
大きな力を出せる筋肉を得るだけでもハードルが高いのに、指ごとに別々のアクチュエータを導入し、多彩な動きを実際に“再現”してみせたことは、バイオハイブリッド技術の実用化に向けた一里塚といえるでしょう。
そして何より、筋肉が長時間の動作によって疲労し、休ませると回復するという“生体らしさ”は、モーターや油圧システムでは得られないユニークな性質です。
こうした特性を上手に活かすことで、ロボットに“休みながら長期間動く”という柔軟な運用や、筋肉そのものの状態変化を使った新しい情報処理など、今までにないアイデアが生まれる可能性を秘めています。
まさにバイオとロボットの境界を越えた試みが、本格的な大型化と実用性の検討へとステップアップしたことを示す画期的な事例といえるのです。
バイオハイブリッドハンドは疲労も再現する
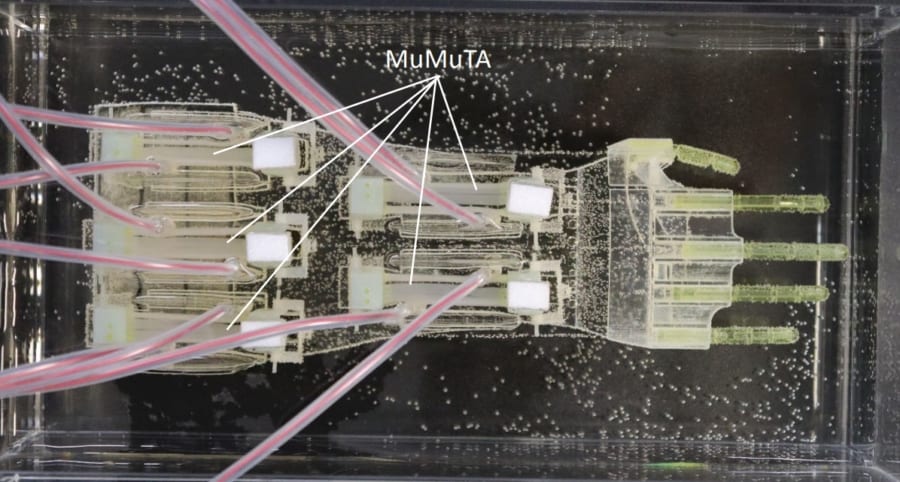
本研究の成果として生み出されたバイオハイブリッドハンドは、長さ18センチメートル、つまり人の手とほぼ同じ大きさです。
しかも、小指から親指まで5本の指をそれぞれ独立して動かせます。
たとえば、ジャンケンの“ハサミ”を作る動作をさせたい場合、小指と薬指、そして親指を曲げる一方で、人差し指と中指を伸ばしたままにするといった細やかな制御が可能です。
また、実験では、指先で小さなピペットチップをつかみ、持ち上げて移動することにも成功しました。
これは複数の関節が連動する必要がある高度な動作で、従来の小さなバイオハイブリッドロボットでは考えにくいレベルの器用さといえます。
研究チームによれば、筋肉の収縮力は約8mN(およそ0.8グラム相当の力)で、収縮率は約13%(最大で4ミリメートル程度の変位)に達しており、“生きた筋肉”ならではの高いポテンシャルが示されています。
興味深いのは、MuMuTAが私たちの筋肉と同じように“疲労”することです。


































