
ATMOは全長約65センチ、重量約5.5キロのロボットで、4本のアームの先にはそれぞれ「車輪」と「プロペラ」が一体化された“多機能スラスター”が取り付けられています。
飛行モードでは、アームが水平に開いてクアッドコプターとして空を飛ぶことができます。
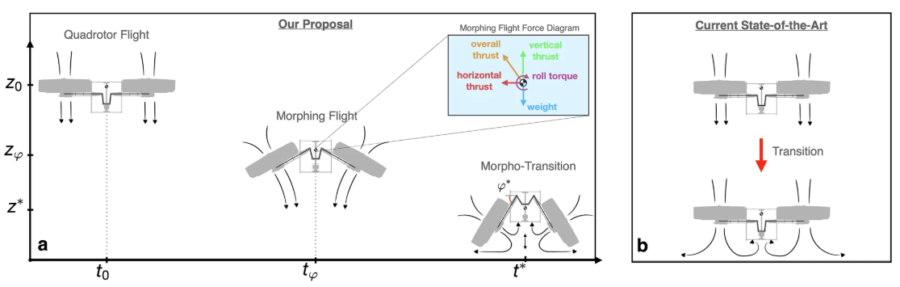
そして地上に近づくと、プロペラアームの角度を変えながら着地し、車輪として地面を走行することができます。
ATMOは一時停止せずとも「地上→空」「空→地上」とスムーズに領域を変更することが可能なのです。
では、どうしてATMOはバランスを崩さずに、空中で変形しながら、走行と飛行のモードを切り替えることができるのでしょうか?
高度な制御アルゴリズムが「停止なしの空と陸の移行」を可能にする
ATMOが変形しながら走行から飛行へと移行できるのはどうしてでしょうか。
まず研究チームは、ドローンの空気力学に着目しました。
ドローンが地面に近づくと、地面で空気が反射して揚力が増すことがあり、これを「地面効果」と呼びます。
ATMOでは、「変形しながら」離着陸する必要があるので、スラスターが傾いた状態での地面効果を測定し、これを上手に制御しなければいけません。
実験では、スラスターが傾いた状態(40〜60度)で地面に近づくと、推力が最大20%増加することが分かりました。
この効果を上手く利用すれば、スラスターを限界まで傾けた状態でも、安全に着地可能になるのです。
そして実際、ATMOは飛行中に最大65度までアームを傾けながら変形し、そのまま車輪モードで地面に着地。着地と同時に走行を開始することにも成功。
また、地上を走りながら飛行モードに変形し、滑らかに離陸することも可能だと分かりました。









































