
その結果、このロボットは前述したように、足を動かして、地上を高速で移動できます。
さらに、目的があるような行動も示します。
たとえば、障害物にぶつかると自動的に方向を変えます。
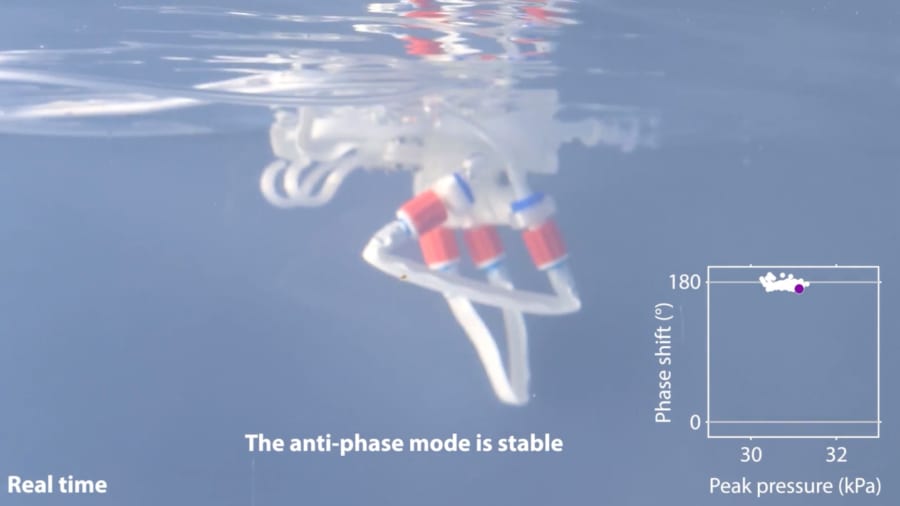
陸上から水上へ移動すると、振動のパターンが自然に変化して適応します。
これらの行動はすべて、外部から命令されたものではありません。
構造と物理現象の中に「知性のようなふるまい」が内蔵されているのです。
これは、生物の身体構造とも共通しています。
私たち人間も、すべての動きを脳だけでコントロールしているわけではありません。
歩くリズムや筋肉の調整の多くは、身体そのものの仕組みに委ねられています。
また研究チームは、動物にみられる例を次のように説明しています。
「たとえば、ヒトデは司令塔のような脳ではなく、局所的なフィードバックと体の動きを利用して、数百本の管足を協調させています」
新しいロボットでも、ヒトデのように「脳が無くても、複雑で機能的な行動を生み出せる」のです。
そしてこの技術は、今後さまざまな場面での活用が期待されています。
医療分野では、体内を移動する小さなカプセルロボットなどにも応用できるかもしれません。
また義足や義手においても、センサーやコンピューターに頼らず、物理的な素材の工夫だけで自然な動きを再現する設計が可能になるかもしれません。
さらに、従来の電子機器が故障するような宇宙などの極限環境でも、力強く動作するロボットを生み出せるかもしれません。
このように、「頭がなくても動けるロボット」は、従来の知能観とは違う角度から「賢さ」や「自律性」を考えるヒントを与えてくれます。




































