
2011年、照月氏ら研究チームは、生きたカイコガの触角を小型ドローンに搭載したバイオハイブリッドドローンを開発しました。
このドローンは、匂いの濃度や方向を高精度で識別しながら、匂いの源を探索することができました。
とはいえ、当時のドローンは、探索範囲が2m程度に限られていました。
そこで研究チームは、新しい研究により、この技術をさらに進化させ、探索精度を向上させることにしました。
進化したバイオハイブリッドドローンは探索範囲が2倍以上に
最新の研究で開発されたバイオハイブリッドドローンも、生きたカイコガの触角をセンサーとして利用しています。
今回の研究では、特に2つの改良が加えられました。
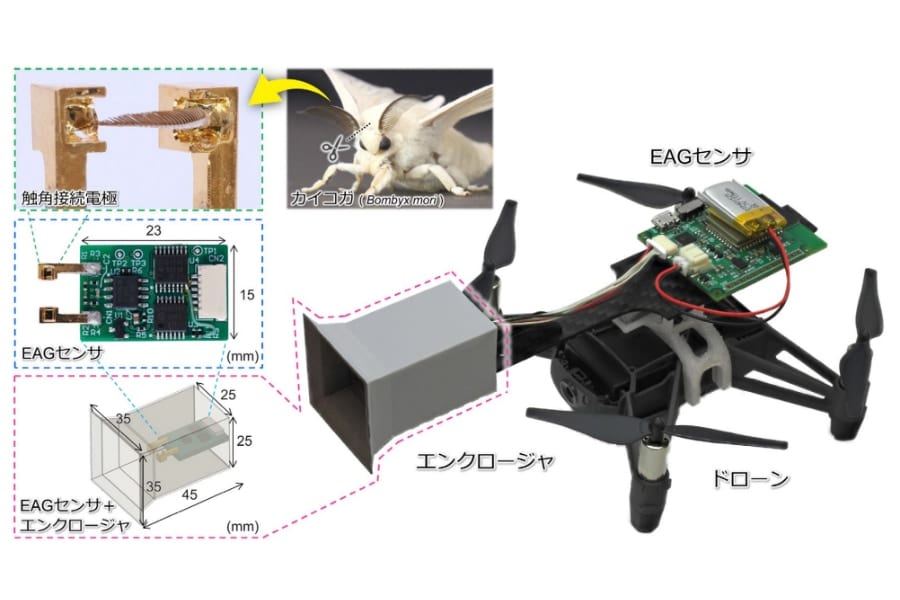
まず、「触角を覆う専用カバー」を開発しました。
カイコガは、羽ばたきによって気流をコントロールし、匂いが含まれる気流を自身の触角に選択的に誘導します。
一方でドローンは、プロペラ飛行による対称的な流れが発生するため、匂いの方向を判断するのは簡単ではありません。
そこで、専用カバーが役立ちます。
これを装着することにより、ドローンが飛行中に受ける気流の影響を抑え、匂いの方向をより正確に検出できるようになりました。
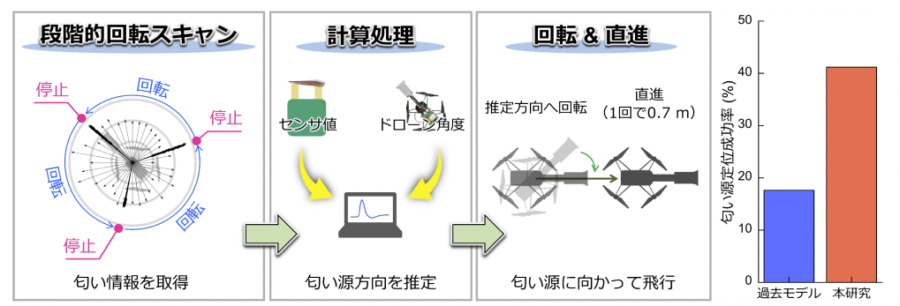
次に、「戦略的に動きを停止する探索アルゴリズム」を採用しました。
昆虫は、匂いを探す際に動き続けることはなく、「停止」することが分かっています。
ロボットによる探索では、このポイントが見落とされがちでした。











































