
そのため、使い終わった後に大量の廃棄物が発生し、環境負荷が大きな問題となっています。
例えば、非生分解性の素材はリサイクルが難しく、最終的には埋立地に長期間残ることで、環境への悪影響が懸念されています。
また、近年注目されるソフトロボティクスの分野では、柔らかく安全なロボットが求められています。
ソフトロボットは、人に直接接触する医療現場や狭い空間での作業など、従来の硬いロボットでは不向きな用途に適しています。
しかし、現状では多くのソフトロボットもシリコンゴムなどの合成材料を使用しており、同様の環境問題や、使用後の廃棄による負担が解消されていません。
そこで、自然由来の素材を使ったロボット開発が急務となっています。
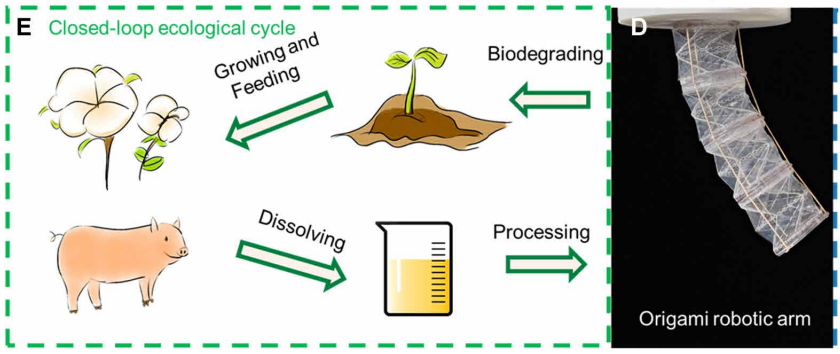
綿から抽出されるセルロースフィルムや、豚から得られるゼラチンは、いずれも生分解性が高く、使用後は安全に分解して自然に還るため、環境にやさしい素材として注目されています。
しかし、これらの素材をロボットに応用するためには、十分な強度、柔軟性、さらにはセンサー機能を備えるといった技術的な課題を克服する必要がありました。
今回の研究は、こうした背景と課題を踏まえ、環境負荷を低減しながらも実用的なロボットを作るための一つの解決策として、セルロースフィルムと豚ゼラチンを組み合わせた新たなアプローチを示しています。
豚ゼラチンそのものが動きを感知する
このロボットアームの大きな特徴のひとつは、豚ゼラチンを利用した高度なセンサー機能にあります。
豚ゼラチンは、ロボットが曲がる際にその形状変化に伴って電気抵抗が変わる性質を持っています。
つまり、アームがどの方向に、どの程度曲がっているかをリアルタイムで感知することができるのです。













































