
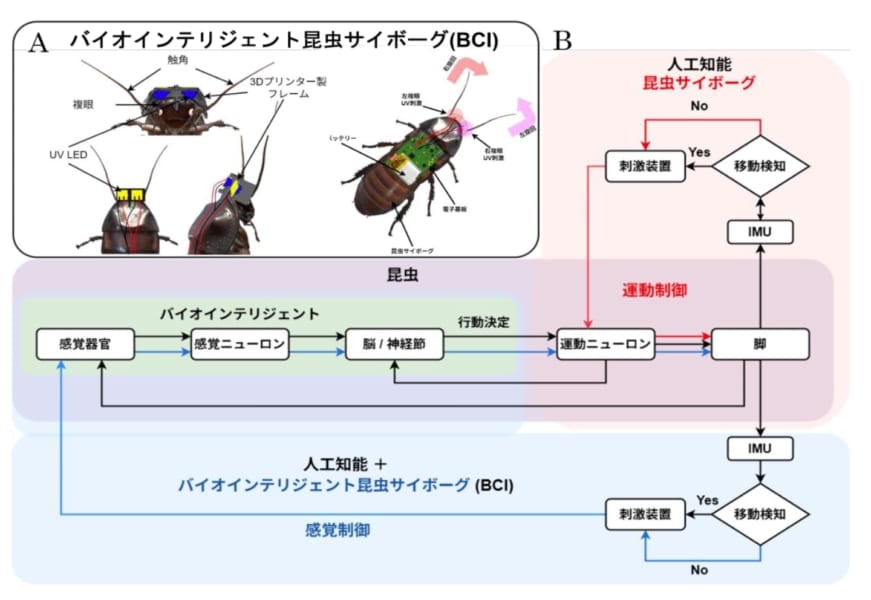
研究チームはこの習性を利用し、昆虫の視覚系を刺激して行動を制御する新たなアプローチを開発しました。
サイボーグ化のために使用されたのは、超軽量3Dプリント製の「UVヘルメット」です。
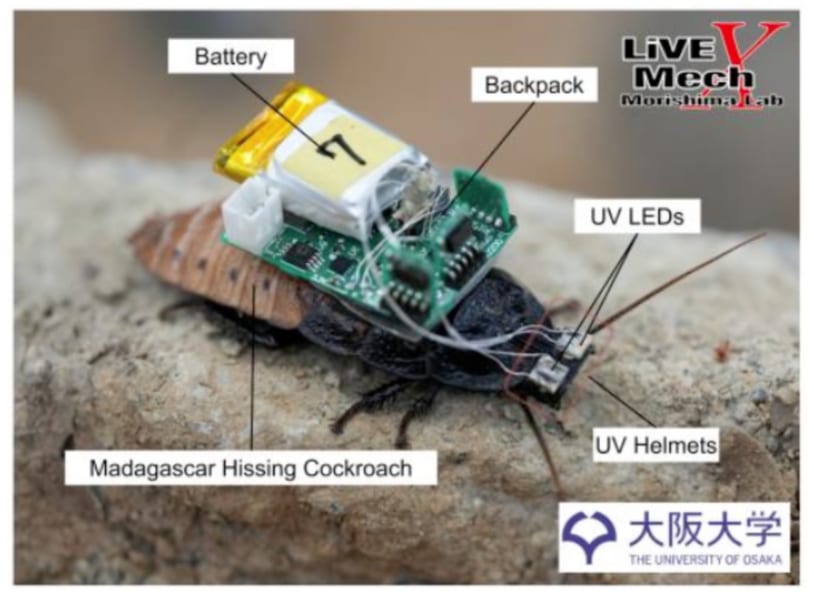
軽量のフレームに左右の複眼をターゲットにしたUV LEDを配置したこのヘルメットは、紫外線によって複眼を刺激。これにより方向制御を実現しました。
さらにゴキブリの背中にはワイヤレスバックパックを搭載。
慣性計測センサーや距離センサーを組み合わせることで、自然な行動を維持しながら、高精度な制御を可能にしました。
外部からの直接電気刺激ではなく、「左複眼に紫外線→右回転」「右複眼に紫外線→左回転」という自然な反応を誘導する画期的なシステムが完成したのです。
ヘルメットを被ったサイボーグゴキブリの安定的・長時間制御に成功
研究チームはいくつかの実験でこのサイボーグ昆虫の性能を評価しました。
その結果、ヘルメットによって昆虫の感覚器官を損なうことなく、高精度な制御が可能であることが示されました。
構造化されていない複雑な環境下でも、自律的なナビゲーションを行うことに成功しています。
また従来の電気刺激による制御の課題である「刺激への慣れ」も、新しい方法では回避できており、安定的かつ長時間の制御が可能になりました。
今回の研究は、「昆虫の自然な知覚・運動制御機構を活かしつつ、最小限の外部刺激で誘導する」という設計思想の元に実施されました。
従来の電気刺激型では人工的な命令に頼りすぎて昆虫本来の適応能力が損なわれがちでしたが、新しい方法では、センサー情報をもとに「動いていない時だけ紫外線を照射」するフィードバック制御を採用。
これにより昆虫の自然行動を補助する形で制御が実現したのです。





































