
カタツムリロボットの群れが協力して「梯子」になったり、「腕」になったりする
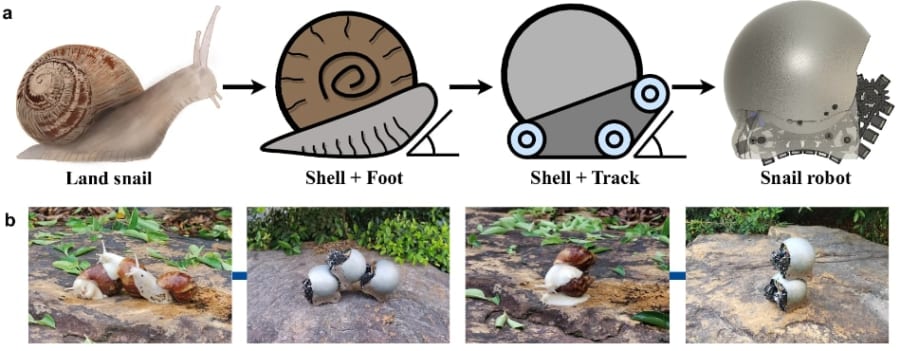
新しく開発されたカタツムリロボットは、上部に強磁性の殻を持っており、その中にバッテリーやマイクロプロセッサ、その他の電子機器が収まっています。
そして機体の底面には、カタツムリの腹足の代わりに、ゴム製の履帯(キャタピラーという登録商標が有名)が2枚備わっています。
カタツムリロボットはこの戦車のような履帯により、平坦な地形だけでなく凸凹の地形でも難なく移動できます。
またそれぞれの履帯の内部には磁石が埋め込まれています。
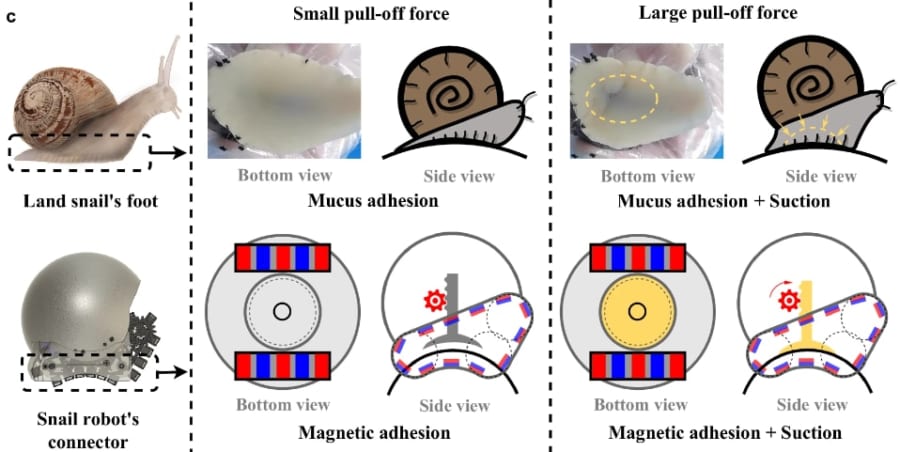
さらに2本の履帯の間には電力によって作動する吸盤が装備されています。
これら2つの要素により、カタツムリロボットは群れとして協力できるようになっています。
あるカタツムリロボットは、磁石入りの履帯により、別のカタツムリロボットの殻の上を簡単に登ることができます。
そして目的に位置に到達すると、吸盤が下がって作動し、より強い力で殻に吸着。2台のロボットがしっかりと固定されるのです。
この機能により、カタツムリロボットの数を増やして任意の形状を作り出すことができます。

しかも吸盤を作動させたまま胴体だけを旋回させることが可能なので、関節を持つ「1本の腕」のように自由自在に動かすこともできます。
ロボットたちが集まって腕のようになり、1つの荷物をつかんで降ろすことも可能なのです。

また複数のロボットを使って、なんとか1体を崖の上に届けたとしても、「その1体がどれだけのことを行えるのか」気になるところですね。
しかも現段階では、それぞれのロボットは人間が遠隔操作しなければならず、1つ1つの作業を考慮すると、あまり実用的ではないかもしれません。

しかし将来的には、AIを導入してカタツムリロボットの群れが自律的に移動したり、互いに協力したりすることが想定されています。
研究チームとしては、いずれカタツムリロボットの群れが、災害現場で生存者を捜索したり、危険な環境を偵察したりするのに役立つと考えています。
確かに画像のように、大量のカタツムリロボットが自律的に行動するなら、様々な働きや効果を期待できるでしょう。
ただ、この光景は、「雨の日に出てくる大量のカタツムリ」を連想させるものであり、人によってはゾッとする未来なのかもしれませんね。
参考文献
Video: Iron-shelled robo-snails swarm together for off-road tasks
元論文
Snail-inspired robotic swarms: a hybrid connector drives collective adaptation in unstructured outdoor environments
ライター
大倉康弘: 得意なジャンルはテクノロジー系。機械構造・生物構造・社会構造など構造を把握するのが好き。科学的で不思議なおもちゃにも目がない。趣味は読書で、読み始めたら朝になってるタイプ。
編集者
海沼 賢: ナゾロジーのディレクションを担当。大学では電気電子工学、大学院では知識科学を専攻。科学進歩と共に分断されがちな分野間交流の場、一般の人々が科学知識とふれあう場の創出を目指しています。









































