常識だと思われていた説でも、実は実験的な証明が存在せず、ただ人から人に語り継がれているだけ。
そんな状態にまたひとつ、終止符が打たれました。
10月26日に『Nature communications』に掲載された論文によって、魚が群れで動くことは、エネルギーの節約になると、実験的に初めて証明されました。
しかし、なぜ今まで証明されていなかったのでしょうか?
目次
エネルギー節約説の実験的証明は困難だった
ハイテクとローテクの融合で謎に挑む
エネルギー節約説の実験的証明は困難だった
魚が群れる理由として、絵本『スイミー』でもお馴染みの「捕食者に対する防御」と共に「エネルギー節約説」が、常に語られてきました。
エネルギー節約説とは、群れの内部にいる魚は前を行く魚のお陰で水の抵抗が少なくなり、同じ移動距離でも必要なエネルギーを節約できるとする説です。
マラソンにおいて古くから知られている「前の人の後ろにぴったり張り付く」と空気抵抗が少なくなって有利になる…とする戦術の水中版とも言えるでしょう。
しかしながら、現在に至るまで、そのエネルギー節約説を実験的に証明した研究はほぼありませんでした。
先行する既存の研究は、どれもシミュレーションや紙面での演算ばかりだったのです。
その主な原因は、測定方法の難しさでした。
水中を移動する魚の消費カロリーを計算するには、本物ソックリの魚の動きを再現する装置を作って仕事量を求めるだけでなく、後続する魚に与える力学的な影響を調べなければなりません。
つまり非常に精巧な魚ロボットと水の動きの可視化…この2つが現実世界でそろうことが絶対条件だったのです。
この2つはシミュレーション世界ならば簡単に実現できる条件ですが、現実では非常に困難でした。
ハイテクとローテクの融合で謎に挑む

しかし今回、ドイツのマックス・プランク研究所の研究者たちは見事、この難関を突破しました。
研究者たちは現実の魚の動きを模倣するために、モーターにあたる駆動装置に「中枢パターン発生器」と呼ばれる、神経回路を模倣したバイオ風の機構を取り入れ、魚の自然な体のうねりを再現しました。
一方で、水の可視化にはインクが用いられました。
インクは魚ロボットの後方から少しずつ放出され、ロボットの動きが作り出す水の動きに乗って移動します。
ロボットとインクという組み合わせは、ハイテクとローテクが結びついた、見事な実験モデルと言えるでしょう。
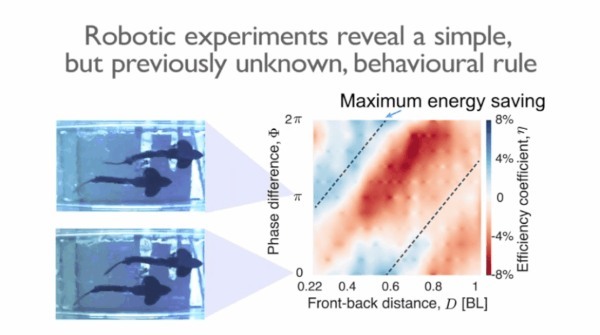
研究者たちはこの魚ロボットを様々な条件の元で1万回にわたって、単独とペアの両方で泳がせデータの収集を行いました。
すると、単独でおよいだロボットとペアの後方で泳いだロボットの電力消費量に、明らかに違いがみえてきました。
ペアの後方の魚ロボットはより少ない消費電力で、より多く動くことができることができていたのです。
またインクによる水の動きの可視化は、その原因も明らかにしました。













































