現在、ロボットが人間のように動く(アウトプットする)ことは実現できてます。しかし、触覚のように、人間らしい感覚を感じさせる(インプットする)ことは非常に難しいものです。
そんな中、アメリカ・コーネル大学機械工学部のロブ・シェパード准教ら研究チームは、11月13日付けの科学誌『Science』にて、人間のような触覚を検知する伸縮性のある人工皮膚を開発したと発表。
新しい人工皮膚は、光によって圧力・曲げ・ひずみなどを検出でき信号として伝えられます。これを応用するなら、ロボットにも人間と同じ感覚を与えることができるかもしれません。
目次
ロボットに触覚を与える
伸縮性分布型光ファイバセンシングとは
ロボットに触覚を与える
現代では、モーションキャプチャを利用して、比較的簡単に人間の動きをコンピュータにフィードバックできます。
後は滑らかに動くロボットにその情報を送れば、人間の動きをロボットが再現することができるでしょう。
しかしこれだけでは、人間(哺乳類)特有の豊かな感覚をロボットに与えたことにはなりません。人間に近づけるには体を動かすだけでなく、物を触ったりつかんだりしたときの触覚を与える必要があるのです。
もちろん、これまでにもロボットが情報を得る手段は存在してきました。センサーと呼ばれるものです。温度センサー、光センサーで温度や明るさを感知できますし、物理センサーで圧力を感知できます。
しかし従来の物理センサーでは、人間の触覚のように繊細で豊富な感覚を得ることは難しいのです。
この点で、研究チームは、触覚を与える伸縮性のある人工皮膚を開発し、様々な分野への応用を可能にしました。
彼らが人工皮膚に利用したのは、論文のタイトルでもある「伸縮性分布型光ファイバセンサー」です。
伸縮性分布型光ファイバセンシングとは
開発されたのは、「伸縮性分布型光ファイバセンサー」という光センサーです。
光ファイバーとは、光を通す繊維のこと。これは主にインターネット回線などで使用されています。光回線は電気信号を光に変換してすばやく伝送しているのですが、この光の経路となるのが光ファイバーなのです。
そして近年、この光ファイバーを用いた「光ファイバセンシング」という技術が注目されています。
本来、光ファイバーは伝送する光が外部からの影響を受けないよう保護されるのですが、逆にこの性質をセンサーとして利用できます。
つまり、受け取った光の性質によってセンサー部分の温度変化やひずみなどを感知できるのです。この光ファイバセンシングは故障しづらくランニングコストも低いという特徴があります。
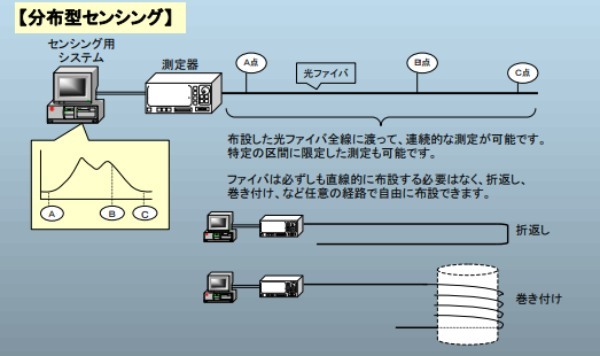
そしてこの中には分布型光ファイバセンシング(DFOS)という技術もあります。これは、局所的な測定ではなく、連続した測定が可能であり、グラフのように全体的かつ連続的なデータや変化を観測できます。
そのためDFOSは橋、道路、建物などの機械的な変形を監視するために用いられてきました。
さて、シェパード氏らが開発したのは伸縮性のDFOSであり、これを、触覚情報を得るための人工皮膚システムに応用したのです。












































