最近、チーターなどがもつ「ふわふわな尻尾」が、動物の俊敏性と安定性を向上させていたと判明。
アメリカ・カーネギーメロン大学機械工学科に所属するジェセフ・ノービー氏ら研究チームは、動物のふわふわな尻尾(空力尻尾)を応用したロボットを開発しました。
ロボットの移動速度に応じたトルクが生み出せるため、高い敏捷性と安定性を獲得できると考えられます。
研究の詳細は、1月6日付けの科学誌『IEEE Transactions on Robotics』に掲載されました。
目次
チーターの敏捷性は、尻尾の「質量」とは無関係だった
チーターの尻尾を応用した尻尾型ロボットを開発
ロボットの空力尻尾は邪魔になる?
チーターの敏捷性は、尻尾の「質量」とは無関係だった

多くの動物は尻尾の質量を利用して、俊敏性を獲得しています。
例えばトカゲは、尻尾がある方向に動くと、その慣性によって体は別方向に動きます。
慣性による俊敏性と安定性は、動物たちが獲物を捕らえるために役立ってきました。
そして約10年前、アメリカ・カリフォルニア大学バークレー校の研究チームは、この特性を利用して尻尾型ロボット(端におもりを付けた金属棒を装備)を開発しており、動物のような安定性を与えました。
このように多くの科学者は、動物の尻尾において、質量こそが重要な役割を果たしていると考えてきました。
最速の動物チーターに関しても、インターネット上には情報が溢れています。
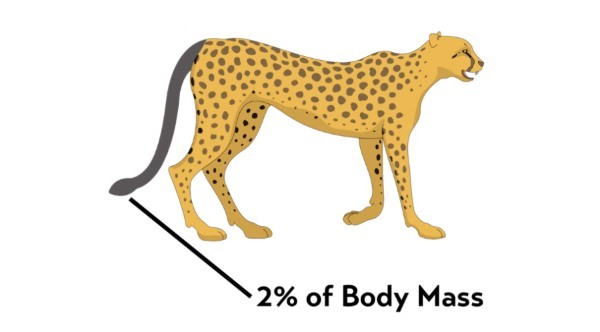
その多くは「チーターの“重い”尻尾が、体の他の部分とバランスをとる役割を果たしている」と説明しているでしょう。
ところが、チーターに関しては他の動物の原則が当てはまりません。
なぜならチーターの尻尾のほとんどは「ふわふわな綿毛」であり、尻尾の被毛を取り除いた重さは、体重のたった約2%しかないのです。
この質量では、十分な慣性を生み出すことができません。
つまり、チーターの尻尾による敏捷性や安定性は質量ではなく、ふわふわな尻尾が生み出す「空気力学」に基づいたものだったのです。
チーターの尻尾を応用した尻尾型ロボットを開発
チーターの尻尾における空気力学上の特性は、数年前から研究されており、新しく発表された論文では、ロボットにどのように応用できるか示されています。
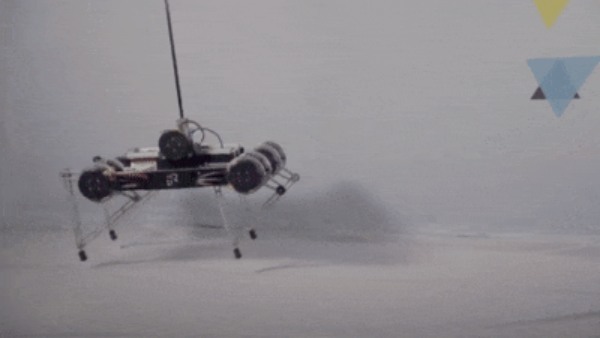
そして研究に基づいて開発されたのが、画像にある4足歩行の尻尾型移動ロボットです。

ロボットに装備された空力尻尾は、棒の端に半円筒形のポリエチレンフィルムが付いたものです。
チーターのフワフワな尻尾とはかけ離れていますが、これはロボットに最適化した結果とのこと。
ノービー氏によると、「チーターを模倣するために、全体が被毛で覆われた尻尾でも実験しましたが、半円筒形が最も大きな抵抗力を生成すると分かった」ようです。
この空力尻尾は、慣性を利用した尻尾とは異なり、生成できるトルクの量が質量ではなく、ロボットの移動速度に依存します。
つまり速く走れば走るほど、大きなトルクを利用できるのです。
ロボットの空力尻尾は邪魔になる?
ロボットの空力尻尾は魅力的ですが、狭い場所では邪魔になってしまいます。
ノービー氏によると、この点も動物たちから改良案を学べるようです。

チーター以外にもトビネズミやムササビなど動きの速い動物は、ふわふわな空力尻尾をもっています。
同時に、それらの尻尾には何らかの柔軟性があり、利便性を高めています。
これはロボットの尻尾が実用性と耐久性を向上させるための良いヒントとなるでしょう。
またチームは収納式の尻尾や、非対称の尻尾を回転させ抵抗係数を素早く変更する方法を考案中です。
このように動物の空力尻尾を応用するなら、質量制限を考えずにロボットに俊敏性や安定性をもたらせます。
例えば、二足歩行のロボットにふわふわな尻尾を付けてバランス感覚を高めたり、尻尾によってダイナミックかつ俊敏に動ける走行マシンを作ったりできるでしょう。
チーターのふわふわな尻尾は、今後もロボットの可能性を大きく広げるはずです。
参考文献
The Cheetah’s Fluffy Tail Points the Way for Robots With High-Speed Agility
元論文
Enabling Dynamic Behaviors With Aerodynamic Drag in Lightweight Tails
提供元・ナゾロジー
【関連記事】
・ウミウシに「セルフ斬首と胴体再生」の新行動を発見 生首から心臓まで再生できる(日本)
・人間に必要な「1日の水分量」は、他の霊長類の半分だと判明! 森からの脱出に成功した要因か
・深海の微生物は「自然に起こる水分解」からエネルギーを得ていた?! エイリアン発見につながる研究結果
・「生体工学網膜」が失明治療に革命を起こす?
・人工培養脳を「乳児の脳」まで生育することに成功








































