最近、アメリカ・カリフォルニア工科大学(Caltech)応用科学部に所属するスーン・ジョー・チョン氏ら研究チームは、空飛ぶ二足歩行ロボットを開発しました。
飛行と歩行の両方が可能であり、兼ね合わせることで高いバランス性能を発揮できます。
研究の詳細は、10月6日付の科学誌『Science Robotics』に掲載されました。
二足歩行ロボットとドローンの融合

従来の二足歩行ロボットは、人間のような動きによってある程度複雑な地形に対応できますが、非常に複雑で荒れた地形ではバランスを保てず無力です。
一方、空を飛ぶドローンは、荒地の上を簡単に移動できますが、エネルギー消費が大きく積載量も限られています。
そこでチームは、二足歩行ロボットとドローンのギャップを埋めることを目的として、空飛ぶ二足歩行ロボット「LEONARDO」を開発しました。
LEONARDOは、一般的な二足歩行ロボットにプロペラが追加された形となっています。

これにより飛行と歩行の両方が可能になっただけでなく、両方の機能を同時に働かせて、バランスをとりながら歩けるようになりました。
ジョー・チョン氏によると、「LEONARDOの開発は、鳥からインスピレーションを得た」とのこと。
鳥は飛行から歩行に移行する際に各部位が複雑な仕方で機能し、優れたバランス能力を発揮します。
そしてチームは、LEONARDOに飛行と歩行の中間の動きを習得させることで、両者にはない驚異的なバランス性能を与えることに成功しました。
優れたバランス性能をもたせることに成功!綱渡りもできる!
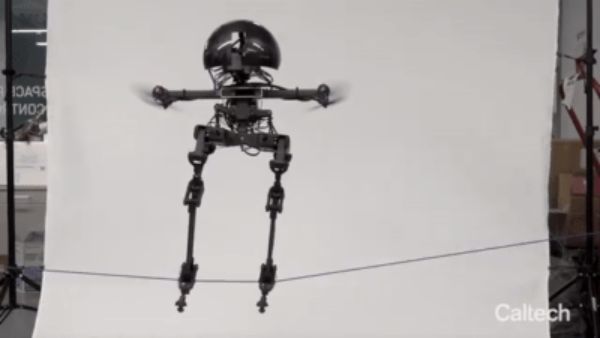
LEONARDOの身長は約76cmであり、肩に4つのプロペラが付いています。
実際に飛ぶこともできますが、本当の持ち味は「プロペラ稼働による驚異的なバランス歩行」です。
プロペラによって重心を調整したり、脚への負担を軽減したりできます。
これにより綱渡りやスケートボードが可能。

また強い横風があっても転倒することなく前進できます。
さらに歩行と飛行の切り替えでスムーズに移動きるようになりました。
例えば、基本的には歩行で前進し、階段だけを小飛行でショートカットすることも可能なのです。
移動手段の幅が広がったため、状況に応じて、移動スピードと省エネのどちらを優先するか選択できるようになっています。

将来的には、非常に高い位置にある電線の検査や橋の監視など、人間には危険な作業を担えると考えられています。
とはいえ現段階では、消費電力が非常に高いというデメリットもあります。
バッテリーフルの状態でも、100秒の飛行、または3.5分の歩行しかできないのです。
今後は制御アルゴリズムの搭載を予定しており、最も安全でエネルギー消費の少ない前進方法を、自ら判断できるよう改善されます。
「飛行と歩行の融合」は、これまでのロボットには難しかった新しい分野を切り開いてくれるでしょう。
参考文献
Caltech’s LEO Flying Biped Can Skateboard and Slackline
LEONARDO, the Bipedal Robot, Can Ride a Skateboard and Walk a Slackline
元論文
A bipedal walking robot that can fly, slackline, and skateboard
提供元・ナゾロジー
【関連記事】
・ウミウシに「セルフ斬首と胴体再生」の新行動を発見 生首から心臓まで再生できる(日本)
・人間に必要な「1日の水分量」は、他の霊長類の半分だと判明! 森からの脱出に成功した要因か
・深海の微生物は「自然に起こる水分解」からエネルギーを得ていた?! エイリアン発見につながる研究結果
・「生体工学網膜」が失明治療に革命を起こす?
・人工培養脳を「乳児の脳」まで生育することに成功













































