
上記の動画では、NBAでバスケットボールの選手として活躍したコービー・ブライアント氏の動きを人型ロボットが見事に再現しています。
では、これほど俊敏な動きを再現できるASAPとはどんな技術なのでしょうか。
シミュレーションと現実のズレをなくす「ASAP」
ASAPは、シミュレーションと現実のズレを修正する「デルタアクションモデル」という新しい技術を使っています。
まず、ロボットは人間の動きをもとにシミュレーションの中で動作を学習します。
次に、その動きを実際のロボットに適用し、どのくらいズレが生じるのかを調べます。
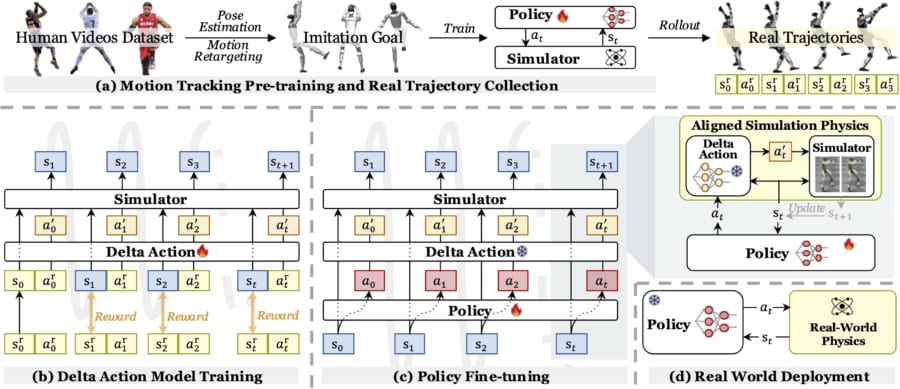
そして、このズレを補正するために、ロボットがどのように動けば良いのかを学習するモデルを作ります。
この補正モデルをシミュレーションに組み込むことで、より現実に近い動きを再現できるようになるのです。
最後に、最適化された動作モデルをロボットに適用します。
このアプローチにより、従来の方法よりもロボットの動きが正確になりました。
また、より素早く、より自然な動作を再現できるようになりました。
例えば、従来の技術で「キック」するよう指示すると、以下の動画のように、よろけてしまいます。
しかし、ASAPを導入すると、現実とシミュレーションのズレを補正できるため、以下の動画のように、よりスムーズなキックが行えるのです。
こうした進化によって、人型ロボットは一層人間に近づくことができました。













































