もちろん現段階では、これらの技術は実用的ではありません。
生体組織は、「寿命の制限」「環境要因の影響を受けやすいこと」また「培養の難しさ」ゆえ、実際にロボットに組み込んで持続させるには、膨大な労力がかかるからです。
それでも将来、このようなバイオハイブリッドロボットは、従来のロボット技術の限界を超える可能性を秘めています。

今回、シェパード氏らは、より使いやすく、堅牢な生体部品として、カビやキノコなどの真菌類が持つ糸状の構造「菌糸」に着目しました。
そもそもキノコは菌糸が集まってできたものであり、地下では根のように広がる菌糸によって栄養を吸収しています。
また菌糸は、厳しい環境でも生育でき、化学的および生物学的信号を感知し、それらに反応する能力も備えています。
まさに堅牢な生体部品としてはピッタリな存在なのです。
そこでシェパード氏らは、菌糸を利用したバイオハイブリッドロボットを開発することにしました。
キノコ(菌糸体)が動かすバイオハイブリッドロボット
生物の細胞は電気を帯びた状態を保っており、細胞外からの種々の刺激によって、その電位を変化させています。
電気生理学では、電極をそれら組織表面や細胞内に固定することで、電圧や電流の制御や測定を行うことが可能です。
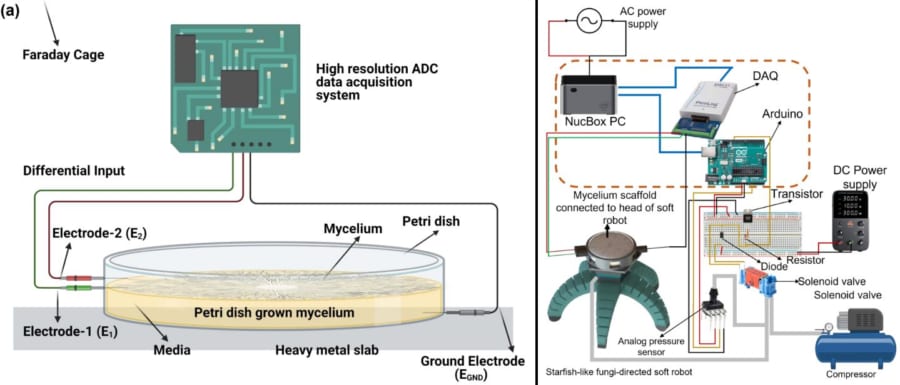
今回、シェパード氏ら研究チームは、ペトリ皿の中で菌糸体(菌糸の集合体)を培養し、その菌糸体と電子機器を電極で繋ぎました。
これにより、菌糸体の電気生理学的な活動が正確に記録され、さらにその信号は、ロボットが理解できるデジタル信号へと変換されました。
その後、この部品は多脚ロボットへと組み込まれ、菌糸体から送られる信号で駆動するよう調整されました。