
「触手」とは、イソギンチャクやクラゲ、タコなどがもつ、複数の長くて柔らかい突起物の名称です。
創作の世界では恐怖・嫌悪の対象として扱われ、架空の触手が人々を襲うことも多いようですが、本来はさまざまな機能を備えた有用な器官です。
そしてアメリカ・ハーバード大学(Harvard University)の工学・応用科学スクールに所属するケイトリン・ベッカー氏ら研究チームは、ものをつかむための「触手ロボ」を開発しました。
複数の触手が優しく絡めとるため、壊れやすく繊細な物体でもつかんで移動させることができます。
研究の詳細は、2022年9月12日付の科学誌『Proceedings of the National Academy of Sciences』に掲載されました。
従来のロボットハンドは「優しくつかむ」のが苦手

触手の奇妙な形状や絡めとるような動きから、触手自体に生理的な嫌悪感を抱く人は多いようです。
そのためSFでは、昔から触手が人々を襲う恐怖の対象として扱われてきました。
現在では触手に対する偏ったイメージが1つの創作ジャンルとして確立されているほどです。

ところが自然界の触手を模倣することは、私たちの生活をもっと便利にしてくれるかもしれません。
ベッカー氏は、触手が「ものをつかむ」のに役立つと考えました。
現在のロボットハンドのほとんどは、繊細で不規則な形状の物体をつかむことが苦手です。
脆い物体を壊さずにつかんで持ち上げるためには、強すぎないグリップ力と工夫されたつかみ方が必要だからです。

クレーンゲームをしたことのある人なら、弱い力で物体を持ち上げることの難しさがよく理解できるでしょう。
これをゲームではなく実生活や仕事で利用するためには、確実性を高めなければいけません。
ロボットハンドに高度な機械学習アルゴリズムとたくさんのセンサーを搭載して、ロボットハンドや物体に加わる圧力を検知・フィードバックしていく必要があるのです。
しかしベッカー氏は、触手のようなロボットハンドを開発することで、従来の複雑さを排除できると考えました。
シンプルな構造の「触手ロボ」が物体を絡めとって持ち上げる

開発された触手ロボには、12本の柔らかい触手があります。
この構造は自然界の触手からヒントを得たものであり、触手ロボは、まるでクラゲが獲物を捕らえるかのように、優しく物体を包み込んで持ち上げることができます。
この触手はゴム製であり、中が空洞になっています。

それぞれの触手は、片側が薄く、もう片方が太くできているので、加圧することで雨の日のくせ毛のようにカールするようになっています。
触手1本の力は非常に弱く、2.3本の触手だけでは物体に絡んでも持ち上げることができません。
しかし、より多くの触手が、互いに絡まり合ったり物体に絡んだりすることで保持力が向上。持ち上げることも可能になります。
集合的な保持力は強いですが、触手1本1本が加える力が弱いので、非常に壊れやすく繊細な物体でも損傷させたりへこませたりすることはありません。
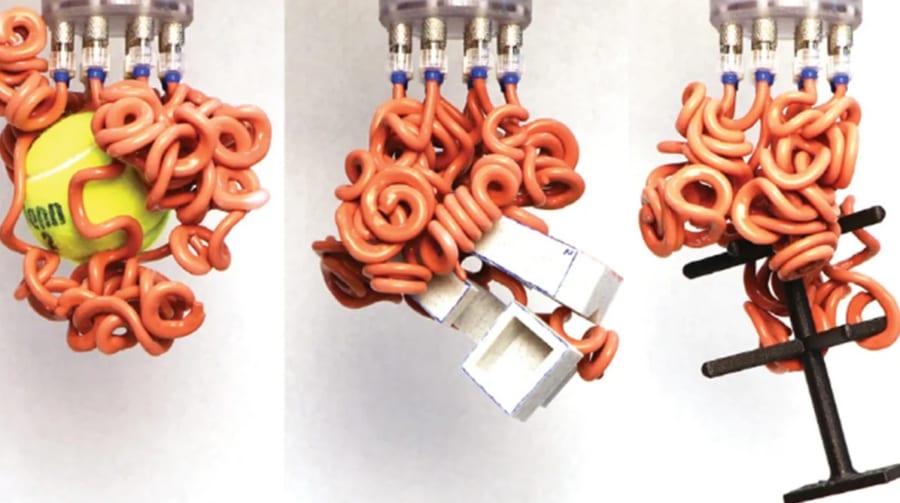
実際にテストでは、複雑な形状のオブジェクトや繊細な植物を傷つけずに持ち上げることに成功しました。
また触手ロボのメリットは、従来のロボットハンドのような複雑さがないことだと言えます。
センサーや機械学習アルゴリズムなどを搭載しなくても、加圧・減圧だけで、物体を優しく掴んで移動させられるのです。
将来的には、果物や野菜の流通、医療現場、ガラス製品を扱う倉庫での活躍が期待できます。
空想世界の触手は恐怖・嫌悪の対象となっていますが、現実世界の触手は便利で有用な存在だったのです。
参考文献
Tentacle robot can gently grasp fragile objects
元論文
Active entanglement enables stochastic, topological grasping













































