
ロボットアニメの定番要素と言えば「変形」ですね。
現実ではめったに見られないため、リアル「変形ロボ」の開発には注目が集まるものです。
最近では、アメリカ・イェール大学(Yale University)工学応用科学部に所属するクレイマー・ボッティリ氏ら研究チームが、カメをモデルにした水陸両用ロボを開発しました。
「リクガメ形態」から「ウミガメ形態」に変形することで、エネルギー効率を低下させずに、活動範囲だけを大きく拡張できるようです。
研究の詳細は、2022年10月12日付の科学誌『Nature』に掲載されました。
移動ロボットの限界

現在、ロボットたちは倉庫内で移動しながら作業したり、生態系のモニタリングを行ったりと、さまざまな場所・環境で活用されています。
このような移動ロボットの需要は拡大しているため、今後のロボット設計には「複数の環境を行き来できる性能」が期待されています。
アプローチの1つに、それぞれの環境に特化した推進システムを複数導入する、という方法があります。
例えば、自動車から大きな翼が伸びた「空飛ぶクルマ」などがこのコンセプトに該当します。
「陸を移動する車輪も、空を飛ぶための翼も、両方搭載すればよい」という考え方ですね。
しかしこのアプローチでは、エネルギー効率を大きく損なう恐れがあります。
それぞれの環境では、利用しない方の推進機構が重荷になるのです。
では、複数の環境を行き来でき、かつエネルギー効率を大きく損なわない「ロボットならではの解決策」があるでしょうか?
「変形」こそが、それに該当するかもしれません。
カメをモデルにした水陸両用ロボ
ボッティリ氏ら研究チームは、ウミガメとリクガメをモデルにしたカメ型ロボット「ART(Amphibious Robotic Turtle)」を開発しました。

ウミガメとリクガメは同じ甲羅をもつカメですが、その足の形状と動かし方が大きく異なります。
ウミガメは海を泳ぐための細長いヒレをもっていますが、リクガメは荷重に耐えつつ陸上を歩くための太くて丸い足をもっているのです。
ARTは足を変形させることで、「ウミガメ形態」から「リクガメ形態」に移行できる「変形ロボ」です。
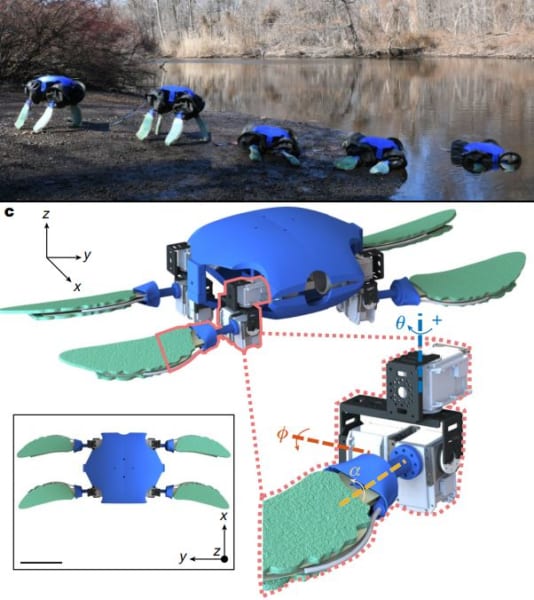
手足は剛性を変化させられる材料と人工筋肉で作られており、環境が変わるときに、形状・剛性・挙動などのあらゆる要素も変化させられます。

実際、陸上では足を膨らませてリクガメのように歩行し、砂浜では足を平たくしてウミガメが這うように移動します。
そして海中では、同じくウミガメのように揚力と抗力に基づいた水中移動が可能なのです。
両方の環境で同じ部品から推進力を生み出しているため、複数の推進機構を持つ従来の水陸両用ロボットに比べてエネルギー効率が高くなる可能性があります。
研究チームは、水陸両用の変形ロボット「ART」が、海岸線の生態系モニタリング、ダイバーのサポート、養殖、環境推移帯での運動物理学の研究などに利用できると考えています。
私たちが憧れてきたリアル「変形ロボット」は、単にかっこいいだけでなく、実用的だったのです。
参考文献
With morphing limbs, a robot that travels by land and water元論文
Multi-environment robotic transitions through adaptive morphogenesis











































