空気圧で動作するソフトロボットは、漏電やガス漏れの心配がなく安全です。
また非常に柔らかいので、人の近くでも安心して動作させられます。
ところが、空気圧ソフトロボットの設計と製造は非常に難しく、完成させるには試行錯誤を重ねなければいけません。
そこでアメリカ・マサチューセッツ工科大学(MIT)のコンピュータ科学・人工知能研究所(CSAIL)に所属するイーユエ・ルオ氏ら研究チームは、シンプルで素早い設計と製造が可能な「ニット型ソフトロボット」を開発しました。
バナナのようなコミカルな見た目ですが、物をつかんだり腕を曲げたりするための補助ロボットとして活躍します。
研究の詳細は、2022年5月2日付けの『MIT CSAILのプレスリリース』とコンピュータ国際学会「CHI 2022」に提出された論文(PDF)で発表されました。
設計から製造までがシンプルな「ニット型ソフトロボット」

研究チームが新しく開発したのは、バナナのような黄色い見た目のソフトロボットです。 このデバイスは、黄色い「特殊ニット」と安価な「既存のゴムチューブ」で構成されています。
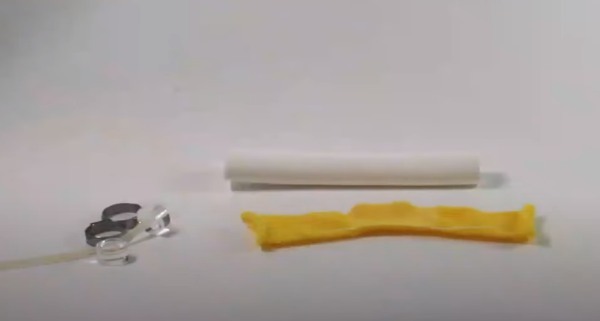
通常、ゴムチューブに空気を入れると均等に膨らみます。 しかしゴムチューブにかぶせた特殊ニットの構造によって、空気が入った時の膨らみ方(曲がる方向)を調整できるのです。
この特殊ニットは一般的なニット製品(セーター、マフラー、手袋)と製造工程が同じなため、従来のソフトロボットのような特殊な開発プロセスは必要ありません。
またデザイナーも、コンピュータ上で動きのパターンを指定するだけで、簡単に設計可能。
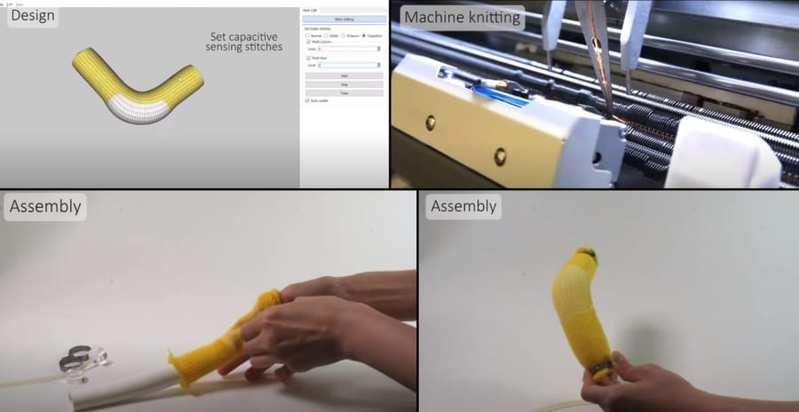
製造前にシミュレートできるため、製造と設計の試行錯誤を重ねる必要もありません。 最後は、製造した特殊ニットを既製品のゴムチューブにかぶせるだけです。
設計から製造のプロセスが非常にシンプルなのが分かりますね。
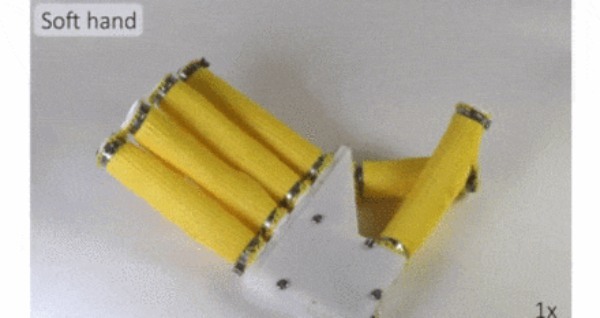
そして研究チームは、ソフトロボットのテストを複数のパターンで実施。
物をつかむロボットハンド、人間の手や腕に装着して筋力をサポートするデバイス、ウネウネと前進する4足歩行ロボットの開発に成功しました。
耐久性にも優れており、どの実験でも糸が切れたりほつれたりすることはありませんでした。 さらにこの特殊ニットには、センサーとして働く導電糸(電気を流す性質をもった糸)が組み込まれています。
センサーのフィードバックにより、つかみ加減を調節したり、人間の接触に反応して動作したりできるのです。
これを応用するなら、ソフトロボットに人間のような反応を与えることも可能でしょう。
とはいえ、現段階では既製品のゴムチューブを利用するため、ソフトロボットの形状が限られています。
今後チームは、さまざまな形に適応できるよう、ソフトロボットの改良に取り組む予定です。
参考文献
Soft assistive robotic wearables get a boost from rapid design tool
元論文
Digital Fabrication of Pneumatic Actuators with Integrated Sensing by Machine Knitting(PDF)
提供元・ナゾロジー
【関連記事】
・ウミウシに「セルフ斬首と胴体再生」の新行動を発見 生首から心臓まで再生できる(日本)
・人間に必要な「1日の水分量」は、他の霊長類の半分だと判明! 森からの脱出に成功した要因か
・深海の微生物は「自然に起こる水分解」からエネルギーを得ていた?! エイリアン発見につながる研究結果
・「生体工学網膜」が失明治療に革命を起こす?
・人工培養脳を「乳児の脳」まで生育することに成功









































