ロボット開発における課題の1つは「エネルギー効率」です。
科学者たちは通常、従来のロボットよりもエネルギー効率を10%向上させることを目標に新しいロボットを開発します。
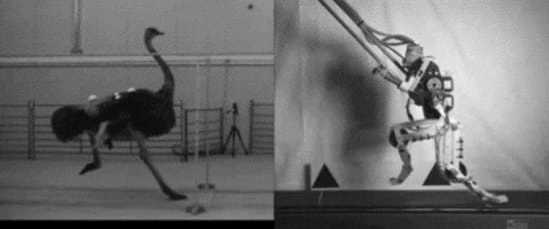
ところが、ドイツのマックスプランク・インテリジェントシステム研究所(MPI-IS)に所属するアレクサンダー・バドリ・スポロウィッツ氏ら研究チームは、走る鳥を参考にしてエネルギー効率を300%向上させた「逆関節型の二足歩行ロボット」を開発しました。
「走る鳥」といえばダチョウやチョコボ(架空ですが)が有名ですが、これらの足の構造を模倣することで、エネルギー効率を大きく高めることに成功したのです。
研究の詳細は、2022年3月16日付の科学誌『Science Robotics』に掲載されました。
走る鳥が疲れない理由
トリと人間では足の構造が異なります。
足を折りたたむ関節の向きが逆なのです。
特に「走る鳥」であるダチョウを観察すると、立ったり走ったりするときに足の動かし方が人間とは大きく異なっているのが分かります。

そして科学者たちは、これら「走る鳥」が速く走ったり疲れずに立ち続けたりできる秘密が、逆関節や腱などの構造にあると考えてきました。
ここで、走る鳥のエネルギー効率の高さを、100kgの人間と比べて考えてみましょう。
100kgの人間のほとんどは速く走ることができません。
立ち続けることはできますが、それは膝を伸ばしてロックしたときだけです。
膝を曲げた状態では、数分で疲れ果ててしまうでしょう。

しかし平均体重100kgにもなるダチョウには、それらが可能です。
多くのトリは、膝を曲げて立ったまま寝ることさえあるのです。
ロボット工学の観点で考えると、立ち続けるトリたちは驚異的だと言えます。
実際、研究チームが以前に製作したロボットは、歩く時だけでなく、立ち続けるためにもモーターで力を加え続けなければいけなかったのです。
もしトリの足の構造を再現できれば、従来のロボットとは比べ物にならないほど、エネルギー効率を高めることができるでしょう。
そのためにチームは、走る鳥を模倣した「逆関節型の二足歩行ロボット」を開発することにしました。
逆関節の二足歩行ロボはエネルギー効率が高い

開発された逆関節ロボット「バードボット」には、それぞれの足にモーターが2つずつしか搭載されていません。
足を前後に振るための股関節のモーターと、足を引き上げるための膝関節のモーターだけなのです。
他の部分にはバネやケーブルが採用されており、ちょうどトリに備わっている腱のような働きをします。
またトリの足を模倣することで、従来のロボットに比べて、多くのモーターやセンサー、電子機器を排除できました。
これにより軽量化とコスト削減を実現できたとのこと。
そしてバードボットは、これらの構造により、立っている時のエネルギー消費がゼロになりました。
従来のロボットとは異なり、電力を消費せずに、膝を曲げたまま立ち続けることができるのです。
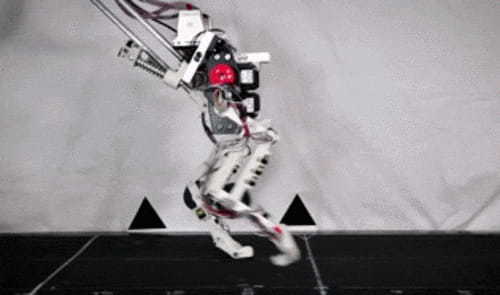
またテストでは、ランニングマシンの上を毎秒75cmの速度でスムーズに走り続けることもできました。
しかもエネルギー効率が非常に高く、従来のロボットと比べて300%も向上させることに成功したのです。
驚異的なエネルギー効率を達成した逆関節ロボット。歩行ロボットの未来は、逆関節の分野にあるのかもしれませんね。
参考文献
BirdBot is energy-efficient thanks to nature as a model
元論文
BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching
提供元・ナゾロジー
【関連記事】
・ウミウシに「セルフ斬首と胴体再生」の新行動を発見 生首から心臓まで再生できる(日本)
・人間に必要な「1日の水分量」は、他の霊長類の半分だと判明! 森からの脱出に成功した要因か
・深海の微生物は「自然に起こる水分解」からエネルギーを得ていた?! エイリアン発見につながる研究結果
・「生体工学網膜」が失明治療に革命を起こす?
・人工培養脳を「乳児の脳」まで生育することに成功













































