
さらに触角や足のセンサーが自然のまま残されているため、昆虫は自律的に障害物を感知し、地形の変化に柔軟に対応できます。
壁を登る「生体マシン」の可能性
今回の研究でもっとも革新的だったのは、「水平面から垂直面への移動」、つまり壁を登る行動の制御に成功したことです。
従来の小型ロボットでは、壁登りのために吸着装置や磁石などの複雑な機構が必要でした。
しかしZoBorgは、自然に備わった吸着性の足裏パッドや鋭いカギ爪、柔軟な脚構造を活かして、まるで自発的に壁を登っているかのような挙動を見せます。
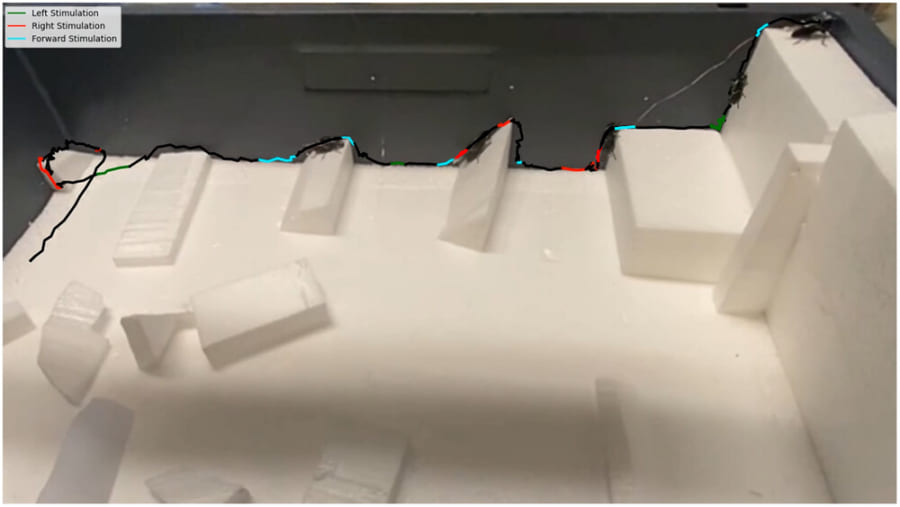
チームは、「オンデマンド登攀(とうはん)プロトコル」と呼ばれる3段階の制御法を構築しました。
1.接近・接触:ZoBorgを壁に向かって誘導し、前翅刺激で壁に接触させます。
2.整列:壁に接触したZoBorgの体を、電気刺激によって壁に対して平行に整えます。
3.登攀開始:再び刺激を加え、壁の方へ横移動させることで、自然な動作として登り始めます。
この方法により、ZoBorgは垂直の壁を71.2%の成功率で登ることに成功。
段差のある障害物(5mm・8mm)に関しては、なんと92〜94%の高い成功率で乗り越えられることも示されました。
また、実験ではZoBorgが自分の体重に等しいバッテリーを搭載した状態でも屋外の砂岩壁を登ることに成功しており、実地運用に耐えうる性能であることが証明されました。
今回の研究が示したのは、自然界が何億年もかけて磨いてきた昆虫の機能に、人工の制御を加えることで、従来のロボットでは実現できなかった能力を引き出せるという事実です。
将来的には、ZoBorgに小型カメラやセンサーを搭載することで、がれきの下に閉じ込められた人の位置を特定したり、傷の状態を確認したりといった、災害現場での実用的な活躍も期待されています。





































